2024.02.29
小学1年生が作りました!!(^^♪
こんにちは!Kicks講座の畑野です(^^)
今日は小学1年生が作った作品のご紹介!
皆様レゴでペンギンを作るといえば固いものをイメージされるのではないでしょうか?
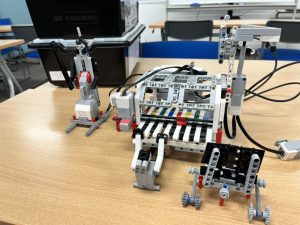
まずKicks講座のペンギンはこちらです!

その先の動くペンギンまで作れたら子ども達は感動しませんか?
そうです!Kicks講座ではそこまで作ります!!
だからこそ今話題に上がっているプログラミング授業なんですね!!
自分が作ったものが動くのは感動しますよね!!
羽をパタパタさせて動くようになりました(^^♪
ここから生徒それぞれに改良をしていただきます。
プログラムでスピードを速くしたりペンギンをイワトビペンギンにしてみたり生徒それぞれに改良していただきます(^^♪
まずは気軽に体験会を受けてみてください(^^)/
体験会は教室でもオンライン見学でも受付中です!!